传感器组合负责卫星导航GNSS(BD/GPS/GLONASS)、惯性传感器数据、气压传感器、温度传感器等的数据采集处理,并进行姿态解算,接收差分航GNSS(BD/GPS/GLONASS)信息,向飞控制计算机发送处理后的传感器组合数据。
【技术指标及性能】
飞控计算机技术指标参数
技术要求 | 指标描述 |
CPU最小系统 | CPU:OMAPL138处理器 内存:256MB NANDFLASH:512MB |
软件 | 提供集成开发环境、 bootrom、vxWorks内核(集成相关驱动程序)。 |
3路+28V:+28V1,+28V2,+28V3(支持宽电压供电,供电范围+6V~+28V) | 飞控计算机工作电源 |
6 路RS232 | RS232模式: 传输方式:全双工 波特率(bps):9600~115200 |
6 路可切换模式串口(默认RS422可配置为半双工RS485),RS422 OMAPL138的ARM核和DSP核外接串口数量可通过更新系统固件进行配置 | RS422模式: 传输方式:全双工 波特率(bps):9600~115200 RS485模式: 传输方式:半双工 波特率(bps):9600~115200 |
1路100/10Mbps自适应网口 | 任何一个网口都可以访问通讯板上的CPU,可以用于软件升级与应用 |
39路PWM接口 | 输出电压:5V 输出频率:1Hz~50MHz |
9路DA接口 | 输出电压:0V~5V |
15路A/D接口 | 用于检测来自外部设备的电压模拟信号 输入范围:0V~30V 精度:0.5V 误差:±0.5% |
2路CAN2.0接口 | 波特率:≤1Mbps |
1路SBUS(双向) | 传输速率:100kbps 电压:直流5V |
1路调试串口 | TTL |
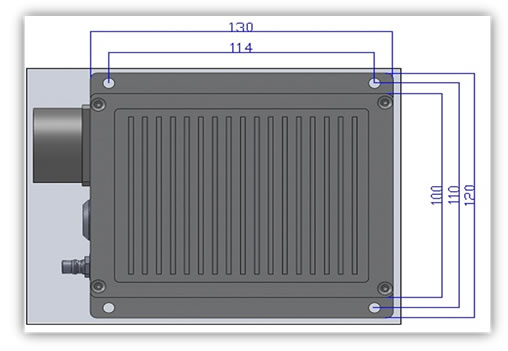
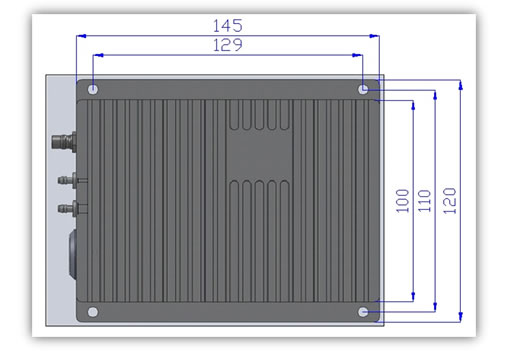
【设备外形尺寸】 (单位:mm)
【实物图】

【环境适用性】
工作温度:-40℃~+65℃;
储存温度:-55℃~+85℃;
相对湿度:≤95%(25℃);
使用高度:》15000m(海拔);
振动:0~2000Hz。
【产品特点】
飞控计算机系统中采用一定的姿态解算方法,融合各种传感器,组成闭环反馈控制系统,进行误差补偿以实现精确、稳定的姿态解算。
【产品应用情况】
飞控计算机系统目前用于各类无人机机的主控设备,未来对外进行推广,可以普及到相关的无人机控制领域。