

ZK-358卫星导航接收机是采用BDS B1/B2/B3+ GPS L1/L2/L5 + GLONASS G1/G2 三系统八频的OEM板卡,采用北斗三频、GPS三频、GLONASS双频三系统进行联合定位,具有超远距离的RTK解算引擎,在超远距离的情况下单历元即可达到分米级精度,硬件尺寸、接口、数据指令与进口板卡兼容。
【产品技术特点】
1、支持短、中、长基线,RTK作业距离最长可达50km。
2、支持超长基线E-RTK测量,作业距离最长可达300km。
3、支持BDS B1/B2/B3、GPS L1/L2/L5 、GLONASS G1/G2三系统八频。
4、支持单系统独立定位和多系统联合定位。
5、支持动态基站,可以用于二位定向、三维测姿。
6、兼容进口板卡物理尺寸、电气接口以及指令报文,可完全替代进口板卡。
7、可直接输出PJK平面坐标,易于各种系统集成及机械控制等。
8、高可靠的载波跟踪技术,大大提高了载波精度,为用户提供高质量的原始观测数据。
9、智能动态灵敏度信号跟踪技术,适应各种环境的变换,适应更加恶劣、更远距离的定位环境。
10、自定义高精简报文,易于数据传输及配套软件的应用开发。
11、体积小、重量轻、功耗低。
【产品组成】
主机尺寸示意图如 图1 所示:
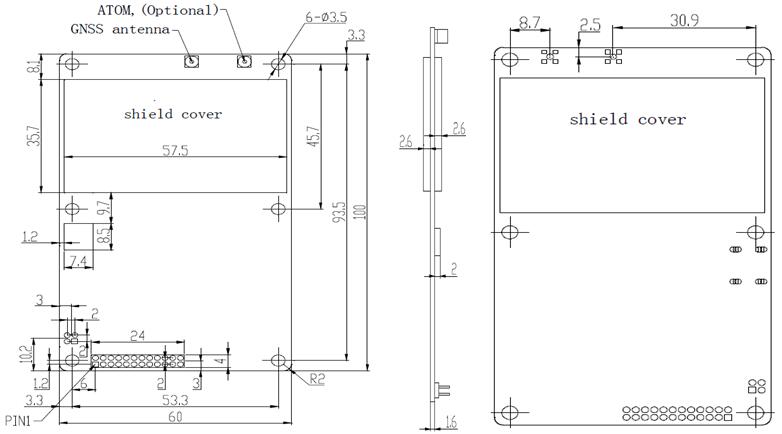
图 1
【产品技术指标】
|
GNSS信号 |
电气特性 |
|
198通道。 GPS L1C/A, L1P, L2P, L5(可同时跟踪14颗GPS卫星)。 BDS B1I, B2I,B3I(可同时跟踪14颗BDS卫星)。 GLONASS G1C, G2C, G1P,G2P(可同时跟踪14颗GLONASS卫星)。 SBAS L1C/A(可同时跟踪3颗SBAS卫星)。 |
数据存储空间:100MB (板卡自带)。 供电电压:+3.3V ~ +5V±5%VDC。 功耗(未接天线):1.85W。
|
|
首次定位时间 |
信号重捕 |
|
冷启动:< 60s。 温启动:< 45s。 热启动(使用RTC):<15s。 |
L1 or B1: 快速:< 1.5s; 普通:< 3s。 |
|
测量准确度 |
精度 |
|
伪距精度: GPS: L1=10cm/L2=10cm; BDS:B1=10cm/B2=10cm/B3=5cm; GLONASS:G1=10cm/G2=10cm。 载波相位精度: GPS:L1=1.0mm/L2=1.0mm/L5=1.0mm; BDS:B1=1.0mm/B2=1.0mm/B3=1.0mm; GLONASS:G1=1.0mm/G2=1.0mm。 |
授时精度:20ns。 标准单点定位精度: 单频:H≤3m, V≤5m (1σ, PDOP≤4); 双频:H≤1.5m, V≤3m (1σ, PDOP≤4)。 静态差分精度(Compass Solution软件支持): H: ±(2.5 +1×10-6×D)mm; V: ±(5 + 1×10-6×D)mm。 |
|
RTK性能 |
数据速率 |
|
RTK初始化时间(基线长小于20km):<10s。 E-RTK初始化时间:1s。 初始化置信度:> 99.9%。 动态差分精度: H:±(10 +1×10-6×D)mm; V:±(20 + 1×10-6×D)mm。 E-RTK差分精度: H:±(200 +1×10-6×D)mm; V:±(400 + 1×10-6×D)mm。 |
测量&定位:1Hz,2Hz,5Hz,10Hz,20Hz(Max)。 |
|
环境要求 |
|
|
工作温度:-40℃ — +80℃。 储存温度:-55℃ — +95℃。 |
|
|
天线接口 |
|
|
天线连接器 :MMCX母头,50Ω。 天线供电电压:+5V±2%VDC @ 0-100mA。 |
|
|
原子钟接口 |
|
|
MMCX母头,50Ω。 |
|
|
数据输出格式 |
硬件接口 / 物理参数 |
|
NMEA-0183:GPGGA, GPGGARTK, GPGSV, GPGLL, GPGSA,GPGST, GPHDT, GPRMC, GPVTG, GPZDA etc.。 RTCM3.0:1004,1005, 1006,1008, 1012, 1104, 1033。 RTCM3.2 MSM4:1074, 1084, 1124。 |
44针公头; 针脚间距2mm。 (其中1~24针脚可用,25~44针脚预留) 尺寸(含接头):100mm×60mm×9mm(见图1)。 重量:42g。 |






